"Art and Science and Making Things"
Monday, October 1, 2012
Wednesday, June 13, 2012


Wednesday, May 23, 2012



Wednesday, May 16, 2012


Friday, May 11, 2012
Tuesday, May 8, 2012







Friday, May 4, 2012
What explorations of Bio-inspired robots can produce
New Exo-Skeleton Robot Lets Paraplegics Walk Again!
http://www.ktla.com/news/landing/ktla-exo-skeleton-robot,0,2433207.story
Bio-inspired robotic locomotion!
The Bio-inspired robotic locomotion challenge is coming to an end. What is Bio-inspired robotic locomotion??? It is a fairly new sub-category of bio-inspired design. It is about learning from nature and applying it to the real world engineering systems.
Currently, the students are designing, re-designing and perfecting their Bio-inspired robots in preparation for the challenge next Thursday! The challenge is to see which Bio-inspired robotic can move through a 2 meter track filled with rice the consuming the least amount of power.
Here are some of the latest designs and testing.




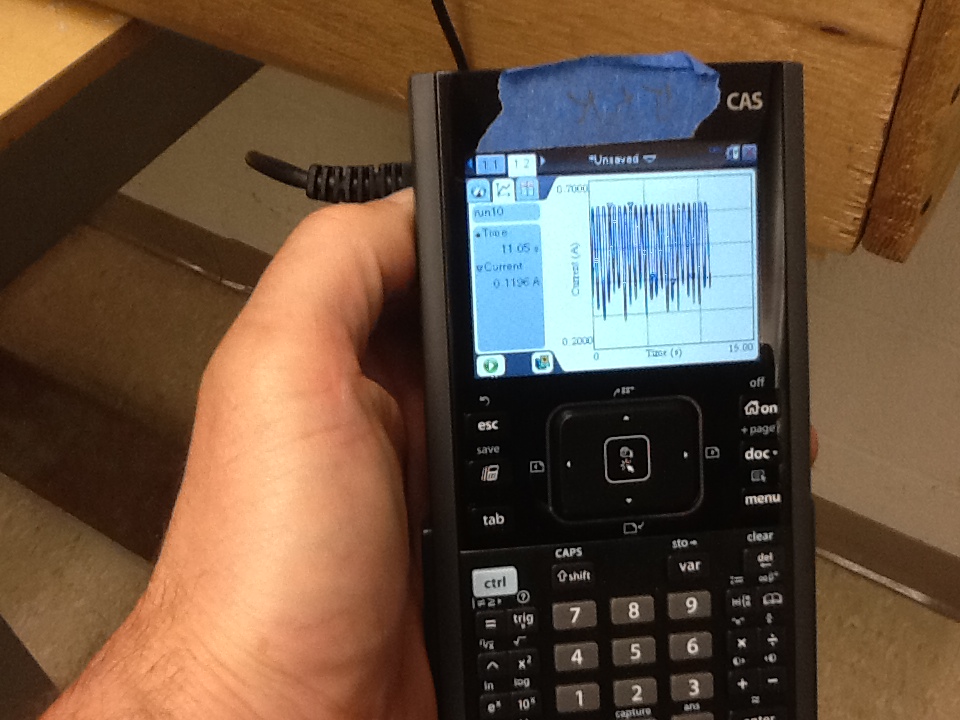
Collecting data using the TI-Nspire Calculator and a Vernier current meter.



This arm has an "elbow joint" and employs a rubber band as a tendon!


Currently, the students are designing, re-designing and perfecting their Bio-inspired robots in preparation for the challenge next Thursday! The challenge is to see which Bio-inspired robotic can move through a 2 meter track filled with rice the consuming the least amount of power.
Here are some of the latest designs and testing.




Collecting data using the TI-Nspire Calculator and a Vernier current meter.


This arm has an "elbow joint" and employs a rubber band as a tendon!

Tuesday, May 1, 2012


Wednesday, April 25, 2012
Biolocomotion
Our Biolocomotion study, using animal locomotion to move through a rice pit, has led to some interesting discussion about what is animal locomotion when translated by a bot and how to measure performance. At this point the performance indicator for our locomotion study is going to take into account three variables: time, distance and current.
All the bots will be timed as they move through 1.5 meters in the rice pit. The current data will be measured at the battery using a vernier current meter connected to a TI Nspire calculator. To get the current from the battery the students are using an in-house hack.
1. aluminum tape is attached to both sides of a piece of paper


4. connect a current meter to the wires.

2. a wire is connected to either side of the piece of paper

3. place this "wire" between the positive side of the battery and the NXT brick
The data collected will then be put into the following Performance Indicator Formula:
Distance / current * Time = Perfomance Indicator
The evolution of the bots continues as well...
Friday, April 13, 2012





Monday, April 9, 2012
Friday, April 6, 2012
Wednesday, April 4, 2012

Tuesday, April 3, 2012
Locomotory Challenge
The C.A.P.P.S. class is going to explore the field of BIOMIMETICS. Biomimetics is the study of the structure and function of biological systems as models for the design and engineering of materials and machines. It is widely regarded as being synonymous with biomimicry, biomimesis, biognosis and similar to biologically inspired design.


The objective is to engineer an autonomous LEGO NXT robot that can travel the farthest and fastest over a rice track.


Monday, April 2, 2012
Thursday, March 29, 2012

Thursday, March 8, 2012










SUMO BOTS are COMING!!!

Design and build a robot that accomplishes the following objectives:
- push the opponent bot from the platform or topple the opponent while
- keeping your own bot upright and inside the circle at all times.
Early SUMO BOt designs


The Tournament Dates
Wednesday: 3/28 Check-in
Thur/Fri: 3/29-30 Double Elimination Competition
Held in the HHS Atrium 7th period!
Subscribe to:
Comments (Atom)